rcu - overflow
background
本章节主要参考9
在介绍RCU之前,我们先来思考下,如何提升程序的性能? 一个最直接的方法是, 提升 并发量, 但是并发程序往往会造成多个线程(cpu) 访问同一个资源, 我们暂时先不考虑, 假设一个程序只有读者,每个读者都会去访问一个read-only list, 那么thread 数量和 吞吐关系图如下:
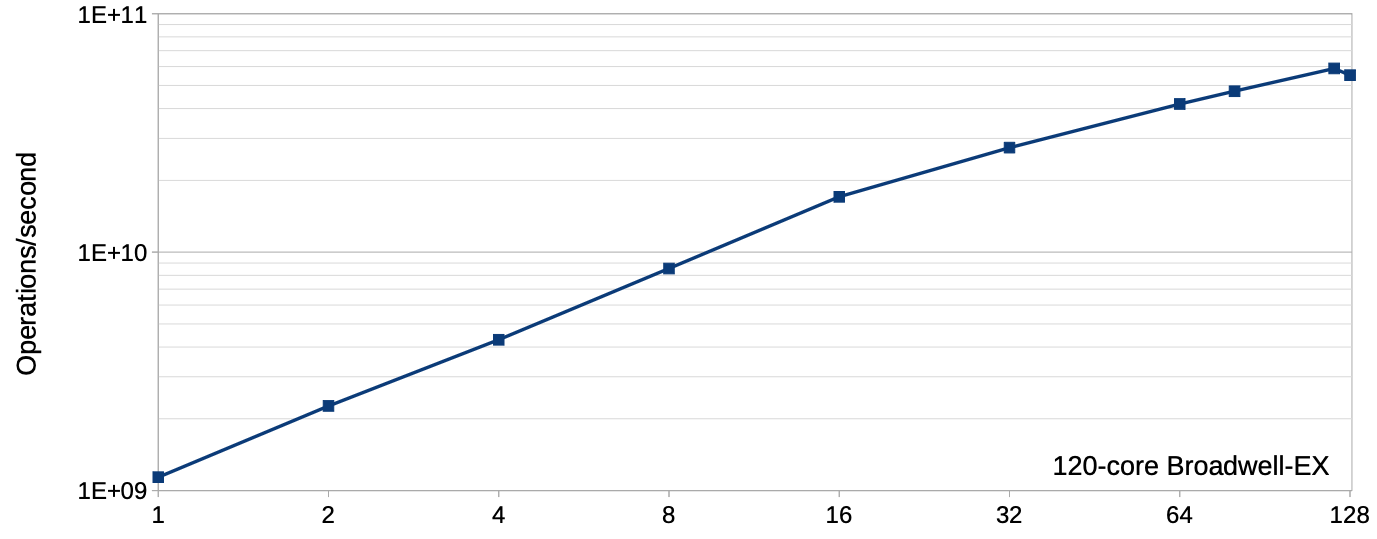
程序的性能会随着线程数量线性增长,这可真是简单粗暴的性能提升方法,但是生活并 不总是真么美好, read-only 场景很少,通常出现在科学计算中,更多的场景是 almost read-only。
于是我们希望, 在写入很少的场景下, 读者性能不受影响。
首先我们来看几种方案:
lock-free
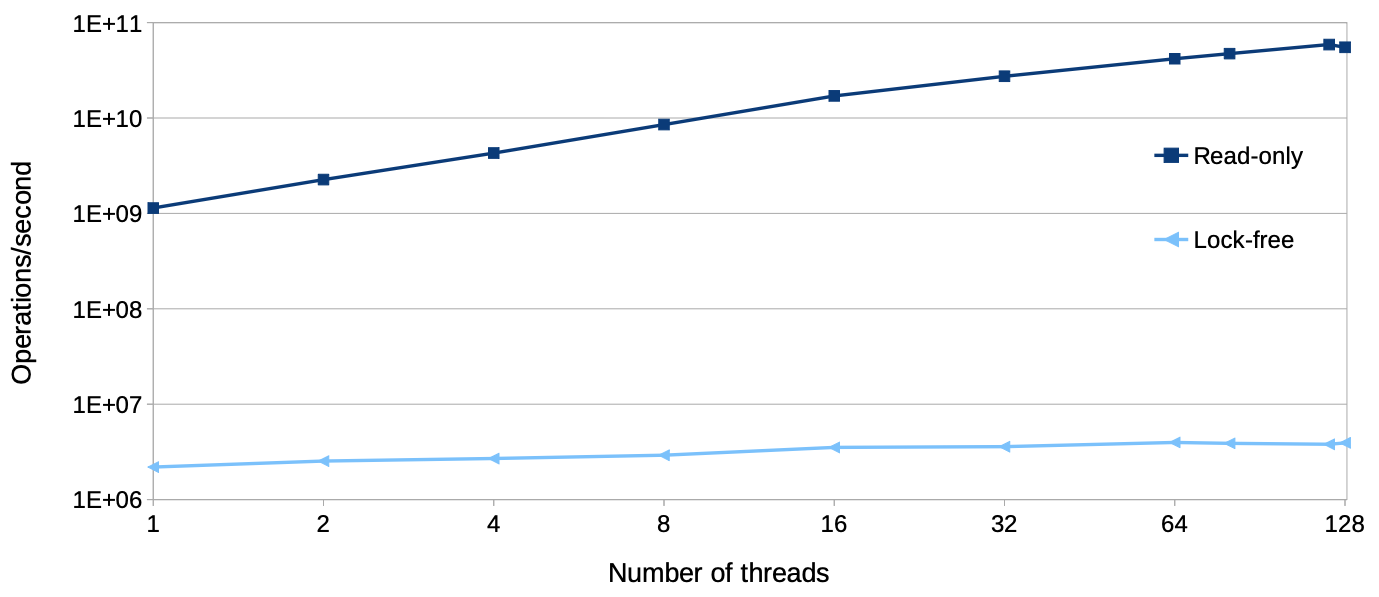
lock-free(list with atomic shared pointers) 虽然是一种比较通用的方案, 其允许 多个写者, 但在read-only 的场景下也会有不小的开销,那在 write-rare的场景下就不太 适用,似乎读写锁更适用一些:
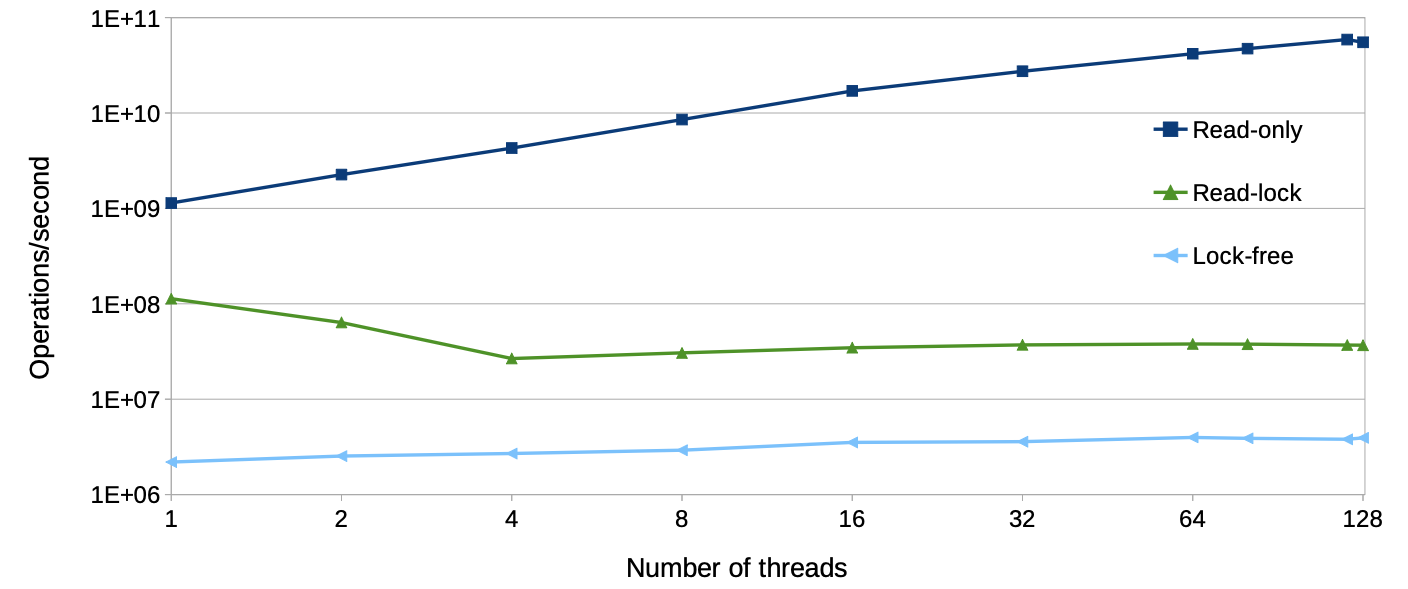
可以发现读写锁虽然比lock-free 性能要好,但在延展性上的表现还是比较差。
造成延展性问题的原因在哪呢?在于这些 同步机制的atomic 操作.
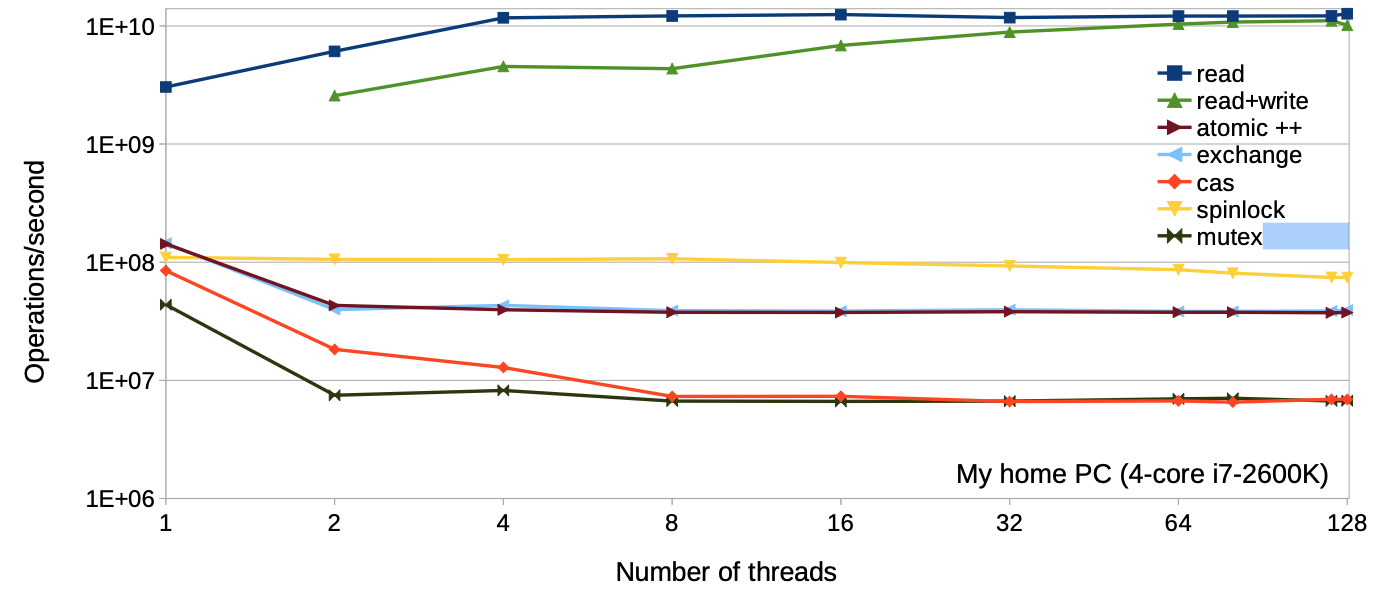
可以发现即便是在thread 为1时,使用图中的同步机制也会出现性能下降,个人猜测可能和 调度负载均衡相关,导致 ATOMIC 变量在各个cpu cacheline中均有副本。
这里 不清楚作者是不是想表达这个意思, 需要看视频确认 TODO
那我们能不能避免这些atomic操作呢? 于是出现了rcu。
RCU 基本概念
RCU (Read-Copy update) 是一种同步机制, 基本原理是, 将写动作分为下面几个步骤(正如 其完整的英文名所示):
- copy
- write
- update
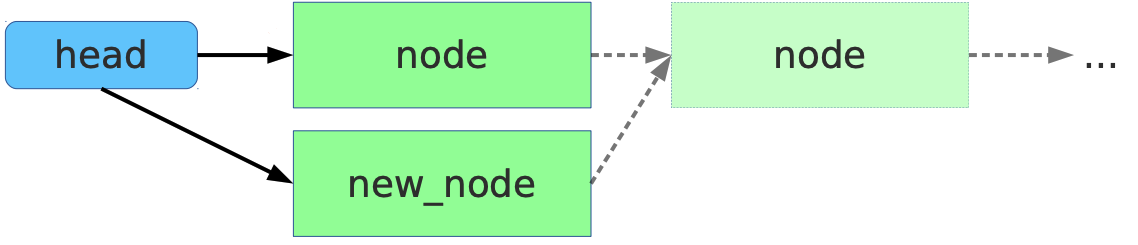
即在写入时首先copy一个副本, 然后在该副本上完成write,在替换原来的就数据(update)。 该机制优秀的点在于其对读者访问特别友好, 因为在写者更新的过程中更新的是副本 (new_node), 读者读取的object(node) 不会被写者更改,所以在读者看来,自己读取 的时候,数据都是read-only的。
在读者端访问不需要加锁,不需要原子操作, 甚至不需要内存屏障(Alpha 除外)
但是对于写者就没有那么友好, 首先 copy 动作需要写者来做,另外,update后替换旧副本释放 旧副本资源,也增加了写者复杂度。如果是同步操作的话,甚至需要写者阻塞等待读临界区 完成.
我们接下来看下rcu具体的机制:
机制
RCU 的机制主要有以下三个部分1:
- Publish-Subscribe Mechanism (for insertion)
- Wait For Pre-Existing RCU Readers to Complete(for deletion)
- Maintain Multiple Versions of Recently Updated Objects (for readers)
Publish-Subscribe Mechanism
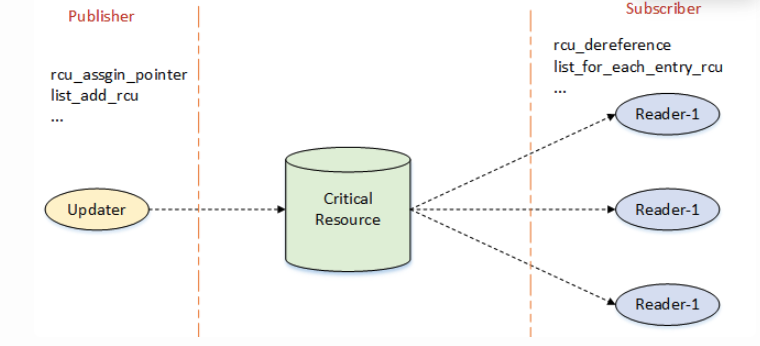
在看rcu 的 insert 流程之前,我们先简单了解发布订阅机制(模式)概念:
发布订阅模式是一种消息传递模式, 用于将消息生成组件与消息消费组件解耦。其核心思想 是,发送者不与接受者直接通信,而是通过一个中间媒介(事件总线 / 主题中心)传递消息, 双方无需知道对方的存在,从而降低耦合度6, 7。
而对应于rcu而言,其中间媒介就是critical resource(可以理解为一个地址), 发布者和订阅 者通过相应的API去操作”中间媒介”.
NOTE
上图来自2
而对于rcu而言对于 updater 和reader 之间也提出了一些要求:
读者可以看不到最新的更新,但是不能看到不完整的更新。
因为读者只想看到
read-only的数据, 这个数据一旦发布后,就不能在更改。
例如下面的写者程序1
1
2
3
4
5
6
7
8
9
10
11
12
13
14
1 struct foo {
2 int a;
3 int b;
4 int c;
5 };
6 struct foo *gp = NULL;
7
8 /* . . . */
9
10 p = kmalloc(sizeof(*p), GFP_KERNEL);
11 p->a = 1;
12 p->b = 2;
13 p->c = 3;
14 gp = p;
写者需要负责让读者看到的new publish foo 为 (a: 1, b: 2, c: 3) 的组合,不能是一个 中间状态。聪明的小伙伴可以想到,这是一个典型的内存模型(memory order)的问题。也就是 让gp = p的这个动作一定发生在p数据结构初始化之后。所以gp = p这个动作需要内存屏障进行 封装, 内核中用rcu_assign_pointer(gp, p); 实现.
(关于rcu_assign_pointer(, )的实现(内存屏障相关),在 TODO TODO TODO TODO 中详细描述。
对于读者来说,也需要保证一定的内存顺序1, 例如下面的顺序:
1
2
3
4
1 p = gp;
2 if (p != NULL) {
3 do_something_with(p->a, p->b, p->c);
4 }
这个程序看起来有内存顺序的问题么? 我们期望的是p->a, p->b, p->c的组合是一致 性的,但是这三个值看起来是在获取到p的值之后才能获取, 而写者保证了p赋值时, p->x已经更新, 所以直观上来说,这个程序不会有问题。不需要任何内存屏障。
但是, 实际上并不是这样。文章1中提到了两个场景:
- alpha 架构推测执行优化
- value-speculation compiler optimizations
总之,在这些场景下,会在获取p 值之前,先获取到p->a, p->b, p->c 的值. value-speculation compiler optimizations 优化比较直观,其会先推测p的值, 然后 获取p->a, p->b, p->c的值,然后在获取实际的 p的值,对比自己的猜测是否正确。
作者在10 处, 给出了详细的解答。
对于下面代码:
关于编译器:
我们将gp = p 这条代码提前至11行之前运行。但是
gp的值可能存在寄存器中, 但是为了执行11-13行,可能将寄存器值溢出(寄存器不够用了). 但是为了能够安全的 提前执行14行(单线程),需要编译器判断gp 的地址和p->a, p->b, p->c这段区域不重 叠,然而编译器往往有这种能力,并且大部分情况下也不重叠。这种情况是有可能发生的。 规避的方法是,合理使用 barrier() 编译器屏障, 或者volatile关键字(首先14 提到11行之前运行本身单线程下就没什么问题,但是需要关注地址重叠问题)
关于CPU:
可以设想A cpu 执行了 该段代码,此时
STORE p->a, p->b, p->c, gp被顺序写入write buffer, 但此时,gp的cacheline在 A cpu 中存在,但是pcacheline 在其他cpu 中存在,在A cpu 中不存在, 此时STOREp->a,b,c就会较快的执行完,过一段时间之后,p的cacheline 才从其他的cpu获取到…(回想下 directory cache conherence)
我们上面定义的读操作定义为Publish, 写操作为Subscribe.
rcu可以应用于各个场景, 其一个典型场景是链表。Linux 为链表定义了一套 RCU的版本, 并将这些publish, Subscribe 嵌入到这些代码中。见附录1。
正如9 的标题 – read, copy, update... Then what? 。是的, 更新完之后 还需要做什么么。但其实接下来的工作才是重点: 当我们将新数据替换掉老数据, 老数据该 怎么处理? 释放! 但是什么时候释放呢?
虽然rcu 的全称为
read copy update, 但这只是整个rcu机制实现的很小的一部分. In its most basic form, RCU is a way of waiting for things to finish.1
Wait For Pre-Existing RCU Readers to Complete
rcu 的机制特色在于等待事件完成的方法, 等待事件完成的方法有很多,例如引用计数, 读 写锁,事件等等。但是RCU 最大的优点在于, 它可以等待很多事件, 无需显式关注每一事件。 也无需担心显式跟踪方案中固有的性能下降、可扩展性限制、复杂的死锁场景以及内存泄漏 风险1。
例如引用计数, 每个object 有一个引用计数, 如果要释放object, 需要关注到每个object 的引用计数是否为0。这可能会带来很多问题,例如如果有多个CPU都用atomic更改refcount, object 一多,可能会引起大量的cacheline抖动。而rcu 从另一个更高的角度 – 关注全局 性质的读临届区,而读临界区中可能包含多个object的访问,这些object 可能有多个 delete的事件。
所以rcu 并不是直接等待事件完成,而是简接通过判断读临界区完成,而间接的判断事件完成 的方法。
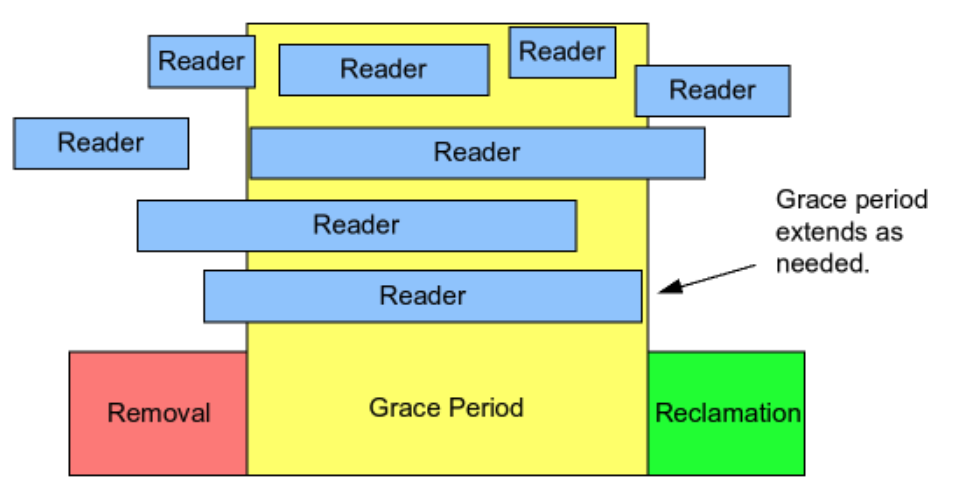
如上图所示, writer动作分为了三个步骤:
- removal: 对应于我们前面提到的
publish流程 - Grace Period: 宽限期, 宽限期开始会记录正在运行的reader,一直等待这些reader中的最后 一个离开临界区
- reclaimation: 释放 object
需要注意的是,宽限期只会等待在宽限期执行之前已经存在的readers,而不会等待在宽限 期开始之后的readers。
使用下图举例:
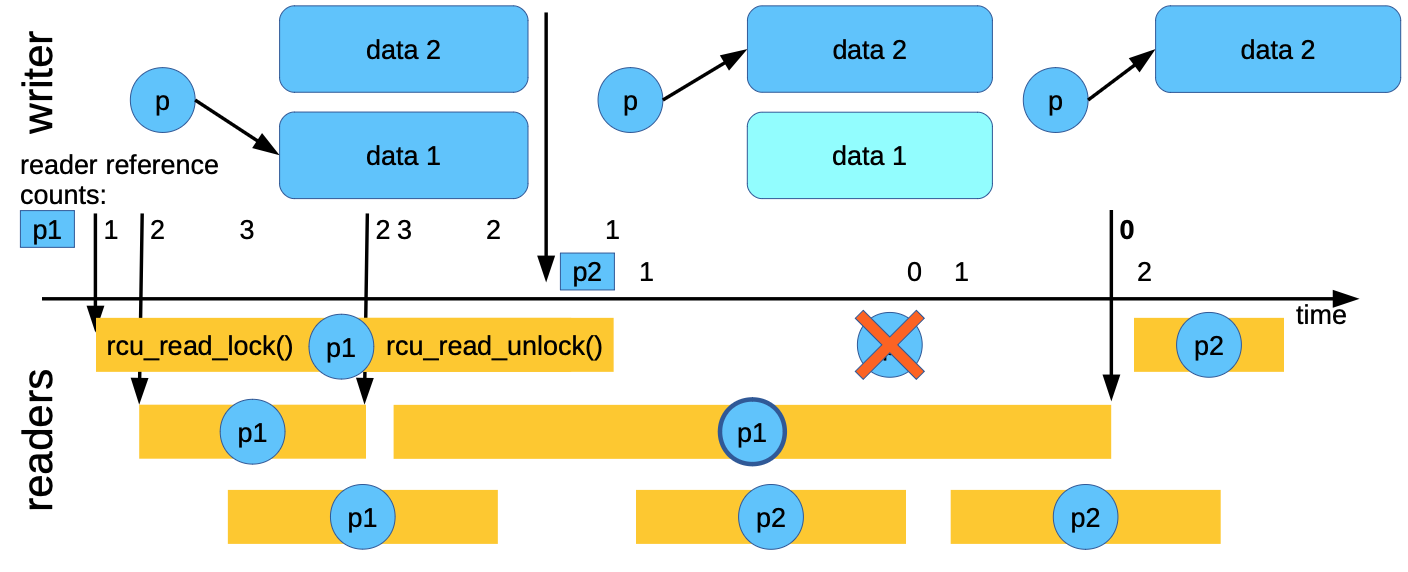
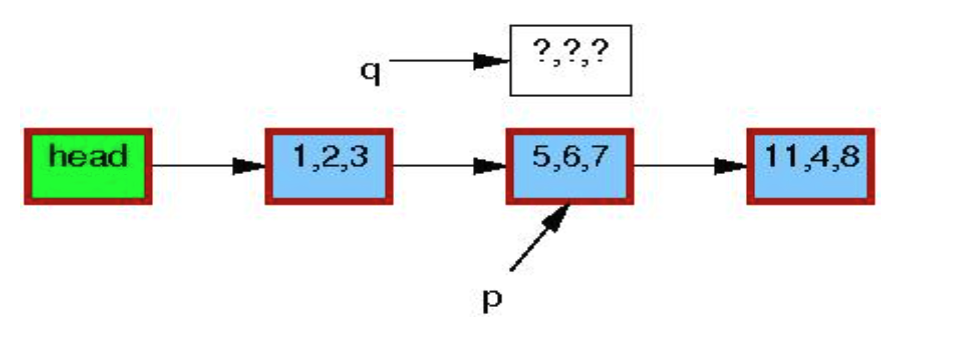
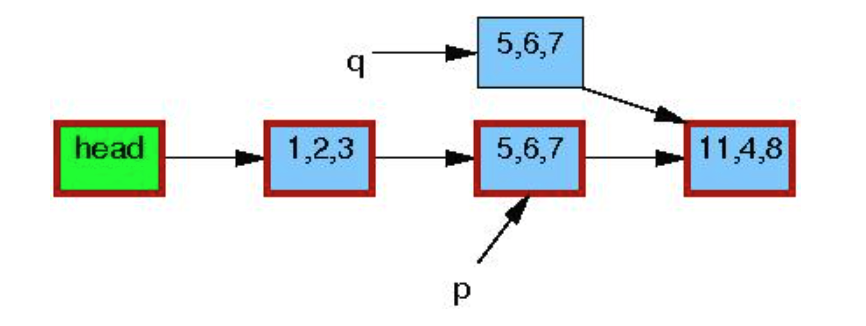
prepare new data:
初始状态为p指针指向data 1, 此时write copy 了一个副本 (data 2),在副本中准备新数据
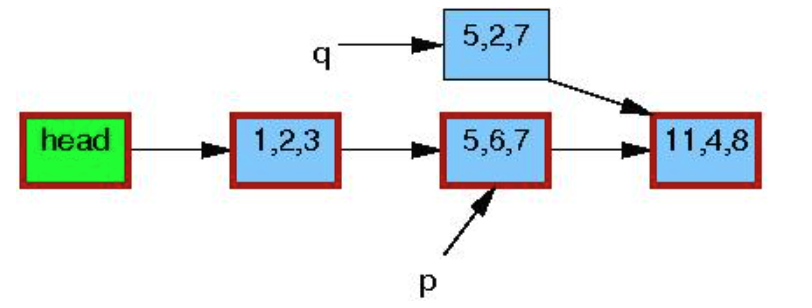
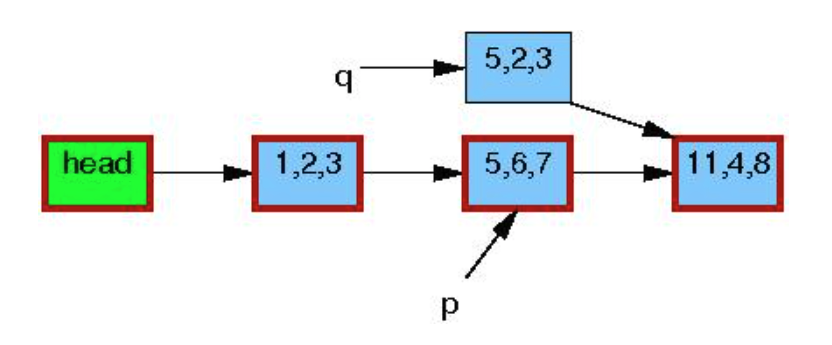
publish new data:
发布新数据,将p指针指向data2
wait for readers to leave:
在发布新数据后,准备将老数据删除。这时,还有一些reader 正在读取老数据(p1)(当然 不一定正在读取p1, 而是在读临界区中, 执行了rcu_read_lock(), 但是还未执行 rcu_read_unlock()), 需要等这些readers退出临界区。
safe to delete data1:
等待最后一个reader退出临界区后, 释放data 1
从上图中可以看出,我们需要关注reader 进入读临界区的 时间是否在 publish new data 之后(图中的 readers p1 表示在publish之间,而 p2 表示在 publish之后), 如果是在 publish 之后,对于data1 的释放就可以不用等待这些readers。
Maintain Multiple Versions of Recently Updated Objects (for readers)
上面提到, 在数据更新过程中,对于读者而言可能会暂时读到old version data。这时,整 个系统中,不同的reader可能读取到的数据不同(对于单写者rcu而言,就会存在两个版本 数据). 本节主要举两个例子来看下:
Example 1: Maintaining Multiple Versions During Deletion
首先 看删除的例子:
1
2
3
4
5
6
1 p = search(head, key);
2 if (p != NULL) {
3 list_del_rcu(&p->list);
4 synchronize_rcu();
5 kfree(p);
6 }
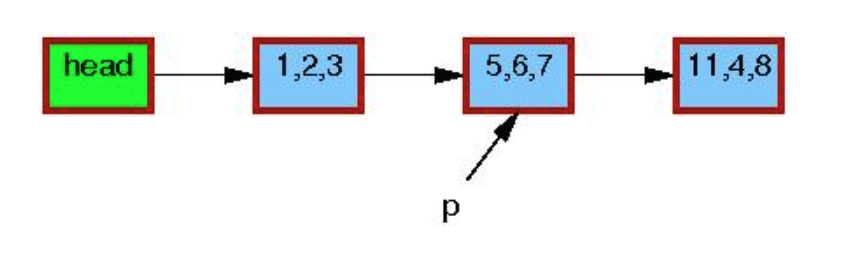
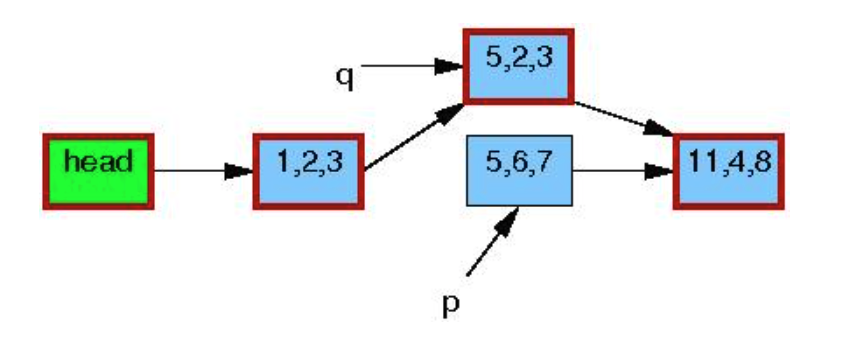
图中的三元组表示p->a, p->b, p->c的值. 红色外框表示元素正在有人引用。 p 表示第 一行 search 后要删除的元素。
第三行执行结束后, 会在链表中删除该成员。但是p指向的object 还未释放, 因为此时 可能有读者在引用:
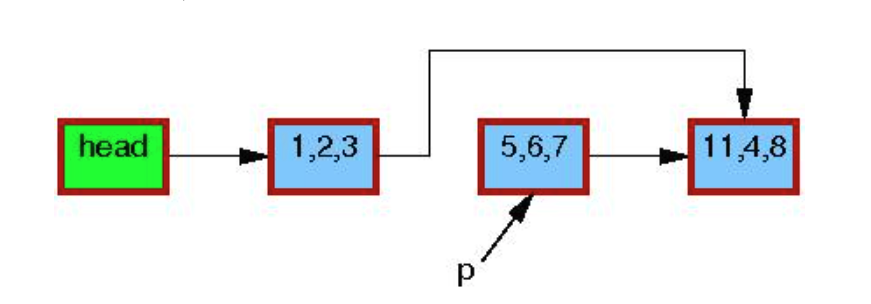
此时不同的读者可能会”看到”, 或者”看不到” p 指向的object。呈现出两个版本的链表 共存。
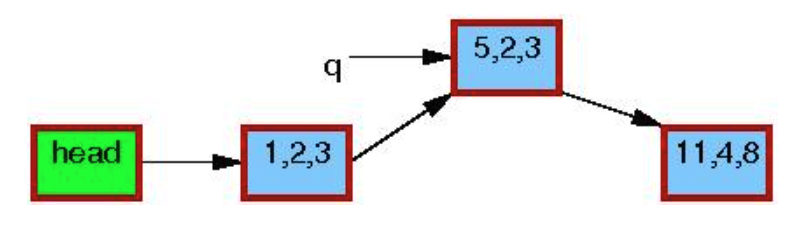
当所有的读者退出读临界区, 表示所有的读者将不再占用p指向的object。此时第四行 synchronize_rcu()返回, 此时链表恢复为单一版本:
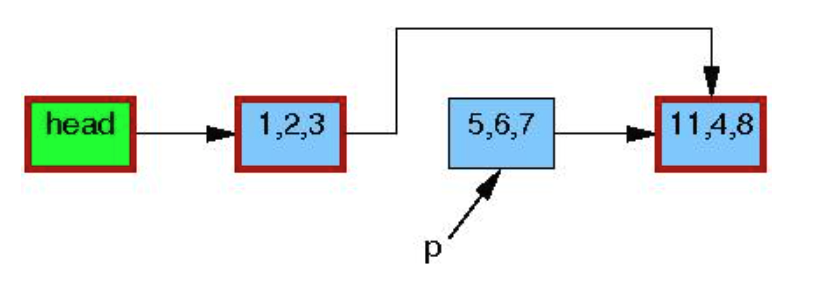
紧接着, 代码执行到5, 释放p指向的内存。

Example 2: Maintaining Multiple Versions During Replacement
1
2
3
4
5
6
7
1 q = kmalloc(sizeof(*p), GFP_KERNEL);
2 *q = *p;
3 q->b = 2;
4 q->c = 3;
5 list_replace_rcu(&p->list, &q->list);
6 synchronize_rcu();
7 kfree(p);
和delete 比较类似:
初始状态:
kmalloc()申请一个新节点:
copy p指向内存到新的object
更新object q->b=2, q->c=3, 此时执行synchronize_rcu()等待宽限期结束:
宽限期结束后,synchronize_rcu()返回,此时没有读者再对p指向的object 有引用:
调用kfree() 释放p指向内存:
总结
对于almost read-only场景, 往往期望读操作的性能非常高(接近于read-only), 而对写 操作的性能不怎么要求. 使用rcu算法可以达到非常好的效果。
RCU在更新数据时,采用了类似于 发布订阅机制,用来结耦reader和writer流程。
RCU虽然全称为 read copy and update, 但是其主要的工作并不在这,rcu 本身是一种 等待事件完成的算法, 其主要的工作量是在等待要删除的object在何时释放。
NEXT
接下来我们来看下具体的RCU实现,包括:
- kernel
- Userspace(QEMU imitating from librcu)
附录
1. Linux rcu list
add
1
2
3
4
5
6
7
8
9
10
11
12
13
14
static inline void list_add_rcu(struct list_head *new, struct list_head *head)
{
__list_add_rcu(new, head, head->next);
}
static inline void __list_add_rcu(struct list_head *new,
struct list_head *prev, struct list_head *next)
{
if (!__list_add_valid(new, prev, next))
return;
new->next = next;
new->prev = prev;
rcu_assign_pointer(list_next_rcu(prev), new);
next->prev = new;
}
new是要添加的成员, 所以在publish之前,需要将其成员初始化完整.
那么问题来了, publish动作是对应是 对一个指针更新?那选择那个指针更新呢?
1
prev->next
Linux链表遍历是正向遍历,也就意味着,读者在遍历过程中只读取entry->next, 所以其保证,该object 初始化完成后(包括其object.list), 对 prev->next 执行 合理的publish动作即可.
list_next_rcu也有RCU的版本:
#define list_next_rcu(list) (*((struct list_head __rcu **)(&(list)->next))) # define __rcu __attribute__((noderef, address_space(__rcu)))这里更像是做了一些编译器check TODO
loop
list_for_each_rcu()的代码:
1
2
3
4
#define list_for_each_rcu(pos, head) \
for (pos = rcu_dereference((head)->next); \
!list_is_head(pos, (head)); \
pos = rcu_dereference(pos->next))
代码非常直接在获取entry->next时, 使用rcu_dereference()接口
del
关于del大家可以简单思考下, 其需要内存屏障来保序么? add 操作需要内存屏障是因为防 止object 更新在发布之后执行。而del操作不会在更改这个object。只是等着释放了。
1
2
3
4
5
static inline void __list_del(struct list_head * prev, struct list_head * next)
{
next->prev = prev;
WRITE_ONCE(prev->next, next);
}
这里的WRITE_ONCE只是voliate 原语, 防止编译器优化, 例如读写撕裂(Read/write "tearing") 8。
update
update 怎么做呢? 也比较简单, 需要将上面几个步骤结合下:
- copy 旧数据到副本中
- 在副本中 write
- delete 旧数据
- update 新数据
参考链接
- What is RCU, Fundamentally?
- Linux 核心設計: RCU 同步機制
- QEMU RCU implementation
- Using RCU (Read-Copy-Update) for synchronization
- Hierarchical RCU
- 发布订阅模式详解
- Publish–subscribe pattern
- WRITE_ONCE in linux kernel lists
- Read, Copy, Update… Then what?
- Forcing the compiler and CPU to execute assignment statements in order ?